INTRODUCCIÓN
Los
robots móviles, resulta útil para llevar a cabo diversas tareas que requieren
una programación o rutas predefinidas, permitiéndole moverse dentro de un
entorno específico. Un ejemplo de ello es el robot enviado al espacio para la
captura de imágenes y la recolección de muestras espaciales. (Munoz-Ceballos
& Suarez-Rivera, 2022).
En
el campo de la robótica móvil, el uso de sistemas avanzados de percepción y
control es fundamental para desarrollar robots capaces de navegar de forma
autónoma en entornos complejos. Un elemento clave en esta tarea es el diseño de
sistemas de evasión de obstáculos que permitan al robot adaptarse a situaciones
dinámicas en tiempo real. Tradicionalmente, sensores como el ultrasónico han
sido ampliamente utilizados para la detección de obstáculos debido a su
simplicidad y precisión en la medición de distancias. Sin embargo, en los
últimos años, la incorporación de sistemas de visión artificial ha
revolucionado este ámbito al ofrecer información más rica y detallada del
entorno. (Arroyave et al., 2018).
Los
robots autónomos, se definen como sistemas capaces de llevar a cabo tareas y
operaciones sin requerir una supervisión o control directo por parte de los
humanos. Su aplicabilidad abarca distintos sectores, desde la industria y el
comercio hasta entornos más desafiantes como el agua, el aire e incluso el
espacio, donde pueden desempeñar funciones complejas de manera independiente.
(Sakai & Nagai, 2022)
En
este contexto, el presente proyecto se enfoca en el desarrollo de un robot
móvil diferencial, basado en el sistema Lego EV3, que utiliza una cámara Pixy,
como sensor para la percepción del entorno y la evasión de obstáculos. Por
medio de la cámara el robot puede diferenciar colores y tamaños de objetos, lo
cual es invaluable para identificar y evadir obstáculos de manera más precisa y
adaptativa. A diferencia de los sensores ultrasónicos, que solo proveen datos
de distancia, la Pixy ofrece información contextual que ayuda al robot a
clasificar y priorizar los objetos detectados. Esta característica resulta
especialmente útil en escenarios donde el robot enfrenta múltiples obstáculos,
ya que puede procesar y seleccionar el camino más adecuado en función de la
posición relativa de cada objeto en su campo de visión.
Para
optimizar esta capacidad de detección y clasificación, el proyecto incorpora
técnicas de programación basadas en redes neuronales. La red neuronal utilizada
se entrena para reconocer patrones y objetos específicos en el entorno del
robot, permitiéndole diferenciar entre distintos tipos de obstáculos y
adaptarse a cambios en el entorno. En particular, la programación de la red
neuronal se centra en la clasificación de los objetos en función de su forma,
tamaño y color, lo cual mejora significativamente la precisión del sistema de
visión artificial. La red recibe como entrada las imágenes capturadas por la
cámara Pixy, las procesa mediante técnicas de visión artificial y clasifica los
objetos en diferentes categorías, determinando así si representan un obstáculo
que debe evadirse. Esta capacidad de clasificación es especialmente relevante en
situaciones donde el robot se enfrenta a obstáculos de diferentes
características, ya que le permite tomar decisiones informadas y planificar su
trayectoria de manera efectiva.
El
uso exclusivo de la cámara Pixy y la red neuronal también presenta ventajas en
términos de procesamiento y simplificación del sistema. Al depender únicamente
de la visión artificial, el robot evita la redundancia de información que
podría generarse al combinar múltiples sensores de diferentes tipos. Este
enfoque no solo reduce el consumo de recursos computacionales, sino que también
permite una integración más directa entre la detección de obstáculos y la
planificación de la trayectoria. La red neuronal actúa como un filtro
inteligente que interpreta las imágenes capturadas por la cámara, permitiendo
al robot concentrarse en los obstáculos relevantes y descartar aquellos
elementos del entorno que no representen una amenaza para su trayectoria.
MATERIALES Y MÉTODOS
Cinemática del Robot Móvil
Por
medio de la cinemática del robot diferencial EV3, se analizó el movimiento y
configuración del robot en su entorno de trabajo, considerando las relaciones
entre los parámetros geométricos del robot y las restricciones de su
movimiento. Las ruedas están controladas de manera independiente para permitir
giros y desplazamientos laterales, lo que lo hace ideal para operaciones en
espacios reducidos. Los ejes 𝑥𝐼 e
𝑦𝐼 definen una base inercial arbitraria en el
plano como el sistema de referencia global de algún origen 0 {𝑥𝐼, 𝑦𝐼}. Para especificar la posición del robot, se elige un
punto P en el chasis del robot como su punto de referencia de posición. La base
{𝑥𝑅, 𝑦𝑅}.define dos ejes en relación con P en el chasis del robot
y, por lo tanto, es la referencia local del robot. La posición de P en el
sistema de referencia global se especifica mediante las coordenadas 𝑥 e 𝑦, la diferencia angular entre los sistemas de referencia
global y local viene dada por 𝜃. Por lo tanto, se representa la postura del robot respecto
al sistema de referencia global:
Para
describir el movimiento del robot en términos de movimientos de componentes, es
necesario representar el sistema de referencia local respecto al sistema de
referencia global.
|
|
(1.2)
|
También
se puede utilizar para representar un sistema de movimiento en el sistema de
referencia global {𝑥𝐼, 𝑦𝐼} al movimiento en términos del sistema de
referencia local {𝑥𝑅, 𝑦𝑅}.
|
|
(1.3)
|
Esta
operación se denota por R(θ)  porque el cálculo de esta operación depende
del valor de 𝜃.
porque el cálculo de esta operación depende
del valor de 𝜃.
|
|
(1.4)
|
Debido
a que (𝑥, 𝑦, 𝜃) son posiciones del robot en el plano derivamos estos
valores (ẋ, ẏ, 𝜃˙) para
obtener la velocidad. Dada alguna velocidad (𝑥˙, 𝑦˙, 𝜃˙) en el
sistema de referencia global, se puede calcular los componentes del movimiento
a lo largo de los ejes locales de este robot 𝑥𝑅, 𝑦𝑅.
|

|
(1.5)
|
Modelo Cinemático del Robot Diferencial
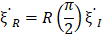
La
configuración de un robot diferencial está dada por un eje en común y dos
ruedas, la velocidad de cada rueda está controlada por un motor independiente.
Las ruedas del robot tienen radio 𝑟 y la distancia entre las mismas es 2𝑏. Se tiene que tomar las siguientes
consideraciones para el análisis cinemático del robot:
Figura 1. Geometría de un robot con
accionamiento direccional.
Restricción
de rodadura (en el plano de la rueda):
|

|
(1.6)
|
Restricción
de deslizamiento (perpendicular al plano de la rueda):
|

|
(1.7)
|
Se aplican por separado a las dos ruedas activas del robot.
Para emplear las dos fórmulas de restricción, primero se debe identificar los
valores de 𝛼 y 𝛽 para cada rueda. Como la tercera rueda
omnidireccional es pasiva y puede moverse libremente en cualquier dirección
(rueda loca). El sistema de referencia local del robot (𝑋𝑅, 𝑌𝑅) está alineado de manera que el robot se mueve hacia
adelante a lo largo del eje +𝑋𝑅.
Para la rueda fija derecha 𝛼 = −90°, β = 180° y 𝑙 = 𝑏. Reemplazando estos valores en las ecuaciones de
restricción para cada rueda fija se obtiene:
Restricciones de rodadura y deslizamiento para la rueda
derecha:
|
|
(1,8)
|
Restricciones de rodadura y deslizamiento para la rueda
izquierda:
|
|
(1,9)
|
A partir de estas ecuaciones matriciales, se construye las
matrices 𝐽1(𝛽𝑠),  y 𝐽2, Además;
se tiene que considerar que las dos ruedas motrices no son orientables las dos
primeras matrices solo están compuestas por los términos 𝐽1𝑓 y 𝐶1𝑓 respectivamente, así
se obtiene que:
y 𝐽2, Además;
se tiene que considerar que las dos ruedas motrices no son orientables las dos
primeras matrices solo están compuestas por los términos 𝐽1𝑓 y 𝐶1𝑓 respectivamente, así
se obtiene que:
|

|
(1,10)
|
Se determina la matriz jacobiana, la cual permite obtener
la expresión cinemática diferencial directa  del robot, conociendo que 𝑚 > 𝑛 en la matriz 𝐵 se obtiene:
del robot, conociendo que 𝑚 > 𝑛 en la matriz 𝐵 se obtiene:
|
|
(1,11)
|
La expresión para la velocidad lineal y angular del robot
en función de la velocidad de las ruedas con respecto a su sistema de
referencia local:
|
|
|
(1,12)
|
La cinemática directa en el sistema inercial quedaría:
|
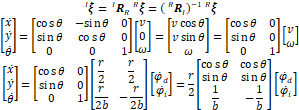
|
(1,13)
|
Las velocidades respecto al sistema inercial y en función
de las velocidades lineales y angulares locales del robot.
|

|
(1,14)
|
|
|

|
(1,15)
|
|
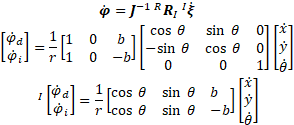
Considerando que el radio de la rueda del robot EV3 es de
2.8 cm y el valor del parámetro b es de 6 cm se pueden obtener las siguientes
ecuaciones finales que representan la cinemática directa final del robot EV3.
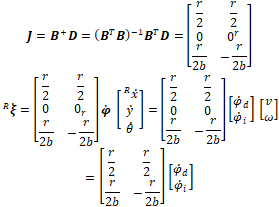
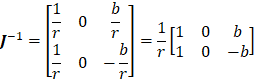
La matriz jacobiana inversa puede ser obtenida a partir de
la expresión 𝐽−1 = 𝐷+𝐵 = (𝐷𝑇𝐷)−1𝐷𝑇𝐵 o utilizando directamente la matriz jacobiana
mediante 𝐽+ = (𝐽𝑇𝐽)−1𝐽𝑇:
|
|
(1,17)
|
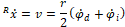
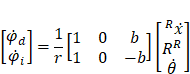
La representación matricial de la cinemática inversa
diferencial respecto al sistema de referencia local del robot es:
|

|
(1,18)
|
Para calcular la cinemática inversa respecto al sistema de
coordenadas global reemplaza en la expresión anterior la relación  , con lo que se obtiene.
, con lo que se obtiene.
|
|
(1,19)
|
Las ecuaciones obtenidas proporcionan las relaciones
cinemáticas correctas entre las variables de movimiento y rotación en el plano,
pero no incluyen la complejidad de la suspensión o la dinámica del motor.
Considerando el parámetro b que es un valor tomado desde el
centro del robot hasta la mitad de la rueda que es de 6 cm se pueden obtener
las siguientes ecuaciones finales que representan la cinemática inversa del robot
EV3.
|
|
(1,20)
|
Visión artificial
La visión artificial es un área de gran importancia en el
campo científico. Utiliza diversas herramientas para adquirir, analizar y
procesar imágenes del entorno, con el objetivo de generar información en forma
de modelos matemáticos que puedan ser interpretados por un computador. A través
de un ordenador, la visión artificial busca percibir, analizar, comprender el
entorno externo y tomar decisiones de forma autónoma según convenga.

Figura 2. Elementos de la visión
artificial.
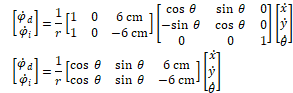
Etapas del Proceso de Visión Artificial
La visión artificial abarca un conjunto de procesos destinados
al estudio de imágenes, que incluyen: captación, preprocesamiento,
segmentación, extracción de características, reconocimiento, clasificación e
interpretación. Esta tecnología permite optimizar procesos de calidad,
selección y verificación de productos. En el ámbito médico, se utiliza para
identificar patrones y detectar anomalías, como tumores, además de asistir en
operaciones con robots de alta precisión. También facilita la lectura de
caracteres, símbolos y datos de productos mediante cámaras y códigos de barras.
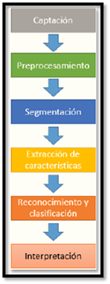
Figura 3. Procesamiento de visión
artificial.
RESULTADOS Y DISCUSIÓN
La
configuración del robot Mindstorm EV3 para evadir obstáculos por medio de la
programación de una red neuronal, reconoce diferentes colores y su entorno de trabajo.
Las redes neuronales artificiales (RNA) son sistemas matemáticos de
procesamiento que se asemejan a las redes neuronales biológicas, que se
comunican entre sí a través de nodos, los cuales envían y reciben información.
El proceso de entrenamiento de estas redes permite que aprendan a identificar
patrones de relación entre las variables definidas y los resultados,
habilitándolas para manejar nuevos datos y proporcionar las respuestas
adecuadas.
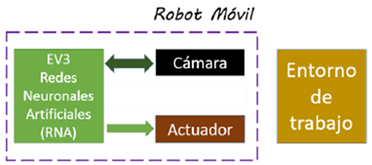
Figura 4. Esquema general del
proyecto.
El
bloque del Mindstorm EV3, está conformado por el microprocesador AM1808 ARM,
este dispositivo cuenta con un sólido sistemas operativos, interfaces de
usuario y máxima flexibilidad de un procesador mixto totalmente integrado
solución.
El
microprocesador es el encargado de recibir las señales de la cámara que se
encuentra instalado en el puerto 1 y un pulsador de marcha en el puerto 3, para
el control de los movimientos por medio de dos motores que están conectados en
los puertos B y C.
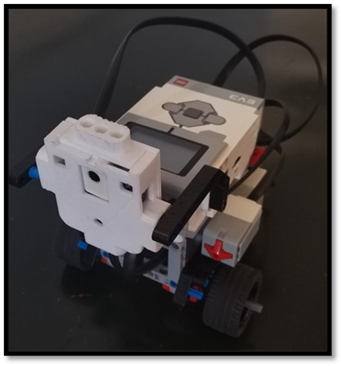
Figura 5. Robot EV3.
Para
la programación del robot EV3 se necesita expandir la memoria con una tarjeta
SD, y realizar la instalación de la imagen de Debian Stretch en la memoria SD e
iniciar el Bloque inteligente Mindstorms EV3.
Por
medio de SSH o Secure Shell, que es un protocolo de administración remota se
conectó al bloque inteligente del EV3 para realizar la programación de manera
inalámbrica, lo que ayuda a realizar pruebas de código de manera más rápida.
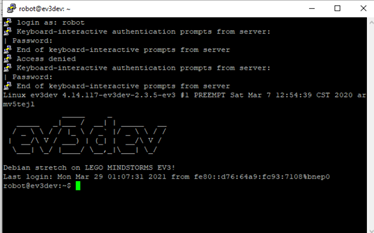
Figura 6. Conexión de manera remota
con el bloque inteligente del EV3.
Se
instala el gestor de paquetes para Python 3, que permite instalar y gestionar
bibliotecas y dependencias de Python para la programación del robot.
Por
medio de la cámara PixyMon, se puede reconocer colores y formas de objetos para
evadir obstáculos, se tiene que configura los label de los colores, el brillo y
se selecciona el tipo de comunicación.
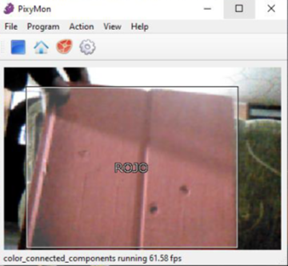
Figura 7. Detección de colores.
Por
medio de la cámara Pixy se pueden detectar colores, formas, tamaños. La
configuración de este se realizar por medio del firmware pixyMon está
disponible en diferentes sistemas operativos Windows, OS X, y Linux. Esta
plataforma es muy fácil de usar con la capacidad de grabar diferentes objetos,
se define el nombre de cada color que detecta la visión artificial, de esta
manera el robot pueda informar cada vez que se encuentre con uno en el camino.
Para
iniciar este proceso se calcula los resultados que se desea obtener mediante
una red neuronal, se utilizó el algoritmo de optimización Limited Memory
Broyden Fletcher Goldfarb para entrenar el modelo de machine learning.
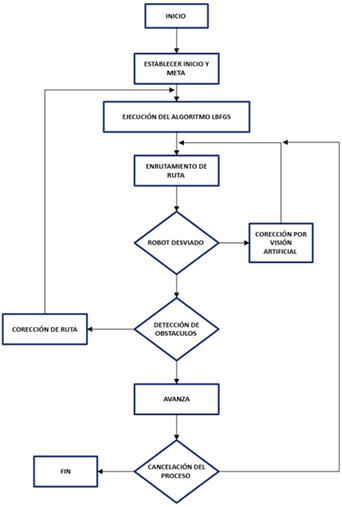
Figura 8. Diagrama de flujo del
robot EV3.
Para
el diseño de la red neuronal, es necesario la instalación de una versión de
Python 3 compatible con la biblioteca Scikit Learn. Para el desarrollo de este
proyecto se utiliza Python 3.6.5 sobre Anaconda, adicionalmente se tiene que
instalar las librerías de Scikit Learn y Numpy.
Para
la generación de la inteligencia artificial se tomó en cuenta todas las
combinaciones posibles que forme la cámara Pixy, para lo cual se todo en cuenta
la resolución de la pantalla del bloque inteligente del EV3 que es de (178x128
px). Se decidió dividir en tres secciones de manera horizontal para poder
identificar la posición del objeto y se asigna valores de -1, 0, 1 y 2 a las
posiciones izquierdas, centro, derecha y sin obstáculo, respectivamente.
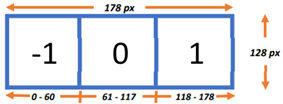
Figura 9. Distribución de pixeles
en pantalla del robot.
Con
las combinaciones posibles de los objetos detectados por la cámara Pixy, se
decidió implementar un perceptrón multicapa con una capa oculta de 4 neuronas,
cuyas entradas corresponden a los valores de la cámara digital, mientras que
las salidas serán señales de activación para los motores izquierdo y derecho.
Figura 10. Cálculo de pesos y sesgo de
la red neuronal.
El
algoritmo de clasificación multicapa de Scikit-learn permite definir el
optimizador para minimizar la función de coste, así como el número de neuronas
en cada capa oculta y la función de activación. Durante el entrenamiento, se
determinó que el algoritmo Limited Memory Broyden-Fletcher-Goldfarb-Shanno
(LBFGS) es el mejor optimizador, ya que converge más rápidamente y ofrece un
rendimiento superior. La función de activación seleccionada es la sigmoide, que
establece que, si la salida de la red neuronal supera el 50% de probabilidad,
se activa como 1; de lo contrario, se apaga como 0. Así, las matrices de peso y
de sesgo obtenidas garantizan una precisión del 100% en las predicciones con
respecto a los datos de entrada. Estas matrices se cargarán en el bloque EV3.
CONCLUSIONES
La
implementación del algoritmo de clasificación multicapa de Scikit-learn, junto
con el optimizador LBFGS, demostró ser altamente efectiva para lograr una alta
precisión en las predicciones, lo que permitió al robot tomar decisiones
informadas al navegar en su entorno.
La
integración de algoritmos de aprendizaje automático con el bloque EV3 demostró
ser un enfoque eficaz que combina procesamiento avanzado con plataformas de
robótica educativa, la sinergia permitió al bloque EV3 ejecutar tareas
complejas como la detección y evasión de obstáculos.
La
implementación de la función de activación sigmoide resultó ser altamente
efectiva en la detección de obstáculos, permitiendo que el robot responda de
manera ágil y precisa a su entorno. Al establecer un umbral de activación del
50% para las salidas de la red neuronal, el sistema demostró una capacidad
robusta para identificar situaciones críticas y activar los mecanismos de
evasión de forma oportuna. Esta precisión no solo mejoró la navegabilidad del
robot en entornos complejos, sino que también validó la efectividad de las
técnicas de aprendizaje automático aplicadas en robótica.
CONTRIBUCIÓN DE LOS AUTORES
Todos
los autores han contribuido de manera equitativa a la concepción, diseño,
desarrollo, análisis de datos y redacción del manuscrito.
AGRADECIMIENTOS
Los
autores expresan su agradecimiento al Instituto Tecnológico Superior Rumiñahui
por el apoyo brindado durante la realización de este estudio.
REFERENCIAS BIBLIOGRÁFICAS
Alcala, U. d. (2021). HERRAMIENTA BÁSICA PARA
EL DATA SCIENCE EN PYTHON. Obtenido de HERRAMIENTA BÁSICA PARA EL DATA SCIENCE
EN PYTHON: https://www.master-data-scientist.com/scikit-learn-data-science/
Alonso, F. (2021, abril 8). Redes Neuronales y
Deep Learning. Capítulo 2: La neurona. Future Space S.A.
https://www.futurespace.es/redes-neuronales-y-deep-learning-capitulo-2-la-neurona/
Arroyave, L. F. O., Carvajal, M. V., &
Ceballos, N. D. M. (2018). NAVEGACION DE ROBOTS MOVILES EN ENTORNOS CON
DISCONTINUIDADES: UNA REVISION.
https://www.redalyc.org/journal/6078/607866319011/html/
Florez, O. U. (2018, agosto 1). Un LEGO a la
vez: Explicando la Matemática de como las Redes Neuronales Aprenden. LatinXinAI.
https://medium.com/latinxinai/un-lego-a-la-vez-explicando-la-matem%C3%A1tica-de-como-las-redes-neuronales-aprenden-ae582ab91da6
Javier Finance. (2021, enero 6). Tipos de
redes neuronales (Clasificación). Inteligencia-artificial.dev.
https://inteligencia-artificial.dev/tipos-redes-neuronales/
Martinez-Zamudio, P., González-Villela, V.,
López-Parra, M., & Ramírez-Reivich, A. C. (2015). Cinemática Diferencial de
un Manipulador Paralelo Plano 3RRR-(RRR)v con Actuación Virtual Indirecta.
Ingeniería mecánica, tecnología y desarrollo, 5(3), 321–331.
https://www.scielo.org.mx/scielo.php?script=sci_arttext&pid=S1665-73812015000200002
Modelo cinemático y simulación de un robot
móvil diferencial. (2022, agosto 15). Roboticoss; edisonsasig.
https://roboticoss.com/modelo-cinematico-y-simulacion-con-python-robot-movil-diferencial/
Munoz-Ceballos, N. D., & Suarez-Rivera, G.
(2022). Criterios de desempeño para evaluar algoritmos de navegación de robots
móviles: una revisión. Revista Iberoamericana de Automática e Informática
Industrial, 19(2), 132-143.
Sakai, T. y Nagai, T. (2022). Robots autónomos
explicables: una encuesta y una perspectiva. Advanced Robotics , 36 (5–6), 219–238. https://doi.org/10.1080/01691864.2022.2029720
Sánchez, D. E. H., Cuenca, J. R. E., Sánchez, C.
C., & Cortés, J. F. R. (s/f). “Diseño,
construcción y modelo dinámico de un robot móvil de tracción diferencial
aplicado al seguimiento de trayectorias”. Org.mx. Recuperado el 31 de octubre
de 2024, de https://somim.org.mx/memorias/memorias2017/articulos/A3_189.pdf